CS:APP 第四章 “Processor Architecture” 的学习笔记。
这章的主要内容为一个简化的指令集 Y86-64 的设计以及 Y86-64 处理器的实现(顺序实现和 pipeline 实现)。
The Y86-64 Instruction Set Architecture
这部分定义了在这一章中用作演示的名为 “Y86-64” 的玩具 ISA。
Y86-64 程序状态
- 15 个寄存器(x86-64 的寄存器除去
%r15,为了简化编码) - 3 个 status flag:
ZF、SF、OF - program counter:
PC - memory
- status code:
Stat,用来表示程序正常运行或发生了异常
Y86-64 指令
Y86-64 指令大致上是 x86-64 的一个子集,但在 operand 等方面有一些简化或区别。
operand 与 x86-64 的区别是:
- Immediate、Register、Memory 都只有 64 位的版本
- Register 只有 15 个
- Memory 不支持
(, ri, s)的部分,只能是Imm/(rb)/Imm(rb)
condition code 只有六个,即 signed compare: le/l/e/ne/ge/g
指令列表,以及与 x86-64 的区别:
irmovq/rrmovq/mrmovq/rmmovq,即将movq按 operand 类型拆成了四个指令addq/subq/andq/xorq,它们只接受寄存器作为 operand,且只设置ZF、SF、OF三个 status flagjmp/jle/jl/je/jne/jge/jg,包括jmp在内都只能跳转到固定的地址,不接受寄存器作为 operand,且这个地址是绝对地址而非相对于 PC 的地址cmovle/cmovl/cmove/cmovne/cmovge/cmovg,它们只接受寄存器作为 operandcall: 地址是绝对地址ret、pushq、popq、nop: 与 x86-64 基本相同halt: 停止运行,将 status code 设为HLT
Y86-64 指令编码
Y86-64 通过对指令的简化,同时也使编码得到了简化,但相应地使得编码不紧凑,会有浪费。
CS:APP Figure 4.2 简明地展示了 Y86-64 的指令编码:
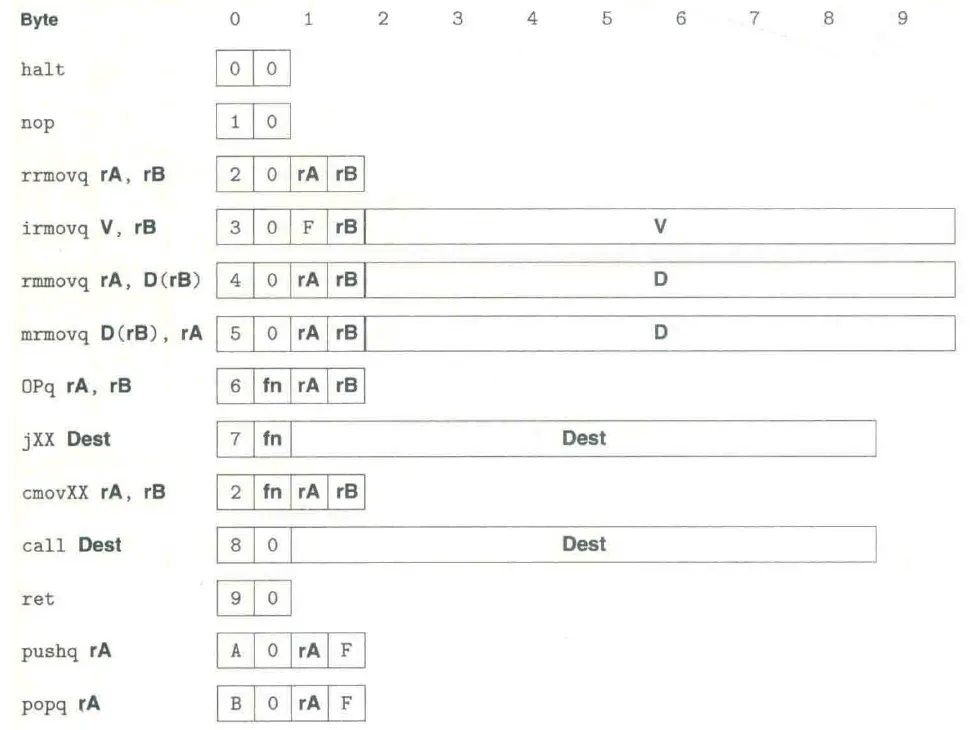
指令类型的编码
指令编码的第一个 byte 表示指令的类型。这个 byte 的高位叫做 code,低位叫做 function,其中 function 只在某几个指令有用。特别地,rrmovq 和 cmovXX 的 code 是相同的,这表示 rrmovq 可以看作一种特殊的 cmovXX。
算术运算的 function: add 0, sub 1, and 2, xor 3
condition code 的 function: le 1, l 2, e 3, ne 4, ge 5, g 6;jmp 的 function 为 0
Register Specifier Byte
除了 jXX 和 call,指令编码的第二个 byte(如果有)的高低位分别表示一个 register identifier。
register identifier 从 %rax 为 0 到 %r14 为 E;F 表示不是寄存器。
Constant Word
在 irmovq、rmmovq/mrmovq、jXX/call 中,分别有一个 8-byte 的 constant word,用来表示 immediate value 或地址,byte ordering 是 little endian。
Y86-64 异常
status code Stat 有四种可能的取值:
AOK: 正常HLT: 执行了halt指令ADR: 访问了不合法的地址INS: 指令编码不合法
在 Y86-64 中,遇到异常后处理器会立即停止运行。
Y86-64 程序
CS:APP Figure 4.8 展示了一个完整的 Y86-64 程序:
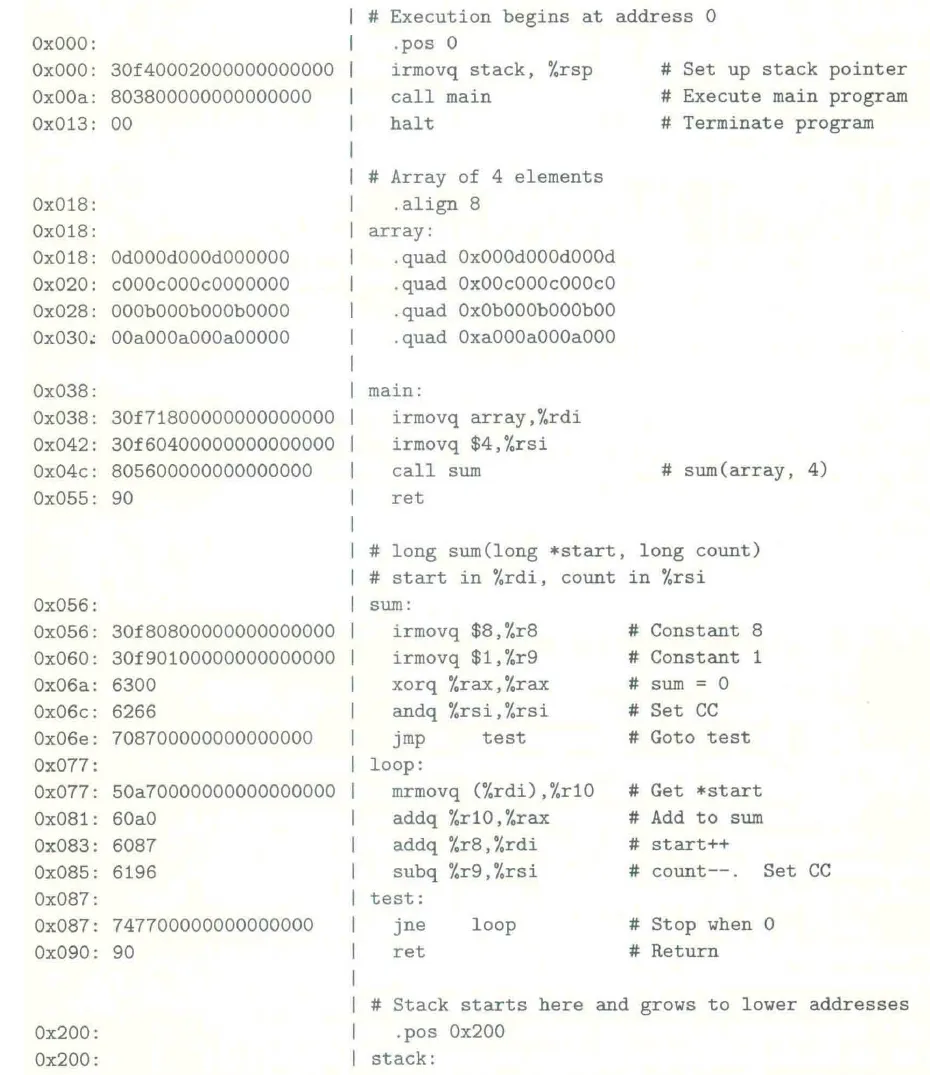
可以下载 Y86-64 tools 并使用 yas 进行汇编,使用 yis 模拟运行。编译 yas 时 需要添加 -fcommon 编译选项。
对 %rsp 进行 push/pop
pushq %rsp、popq %rsp 这两条指令虽然没什么用,但它们的行为可能有歧义,所以在设计 ISA 时明确规定它们的行为是有必要的。
Y86-64 遵循和 x86-64 相同的规则:pushq %rsp 会将旧的(没有减 8 的)%rsp 的值入栈,popq %rsp 相当于 mrmovq (%rsp), %rsp。
Logic Design and the Hardware Control Language HCL
这一章中使用玩具语言 HCL (hardware control language) 来描述 Y86-64 处理器的逻辑设计。
逻辑门
CSAPP Figure 4.9:
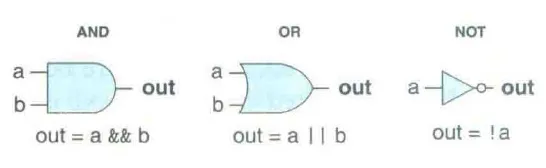
- 图中只展示了输入个数为 2 的 AND 和 OR,但可以有更多输入
- 一旦输入改变,逻辑门的输出很快就会随之改变
组合逻辑电路
组合逻辑电路即由若干逻辑门组合而成的电路,它的特点是无状态,输出仅与输入有关,输入改变后输出很快就会随之改变。
在 HCL 中,用逻辑表达式来表示组合逻辑电路,例如 bool eq = (a && b) || (!a && !b) 表示计算 a、b 是否相等的电路。因为它表示的是电路而不是计算,在这条语句之后,一旦 a、b 的值发生改变,eq 的输出也会改变(和 Vue 的 computed 类似)。
以 word 为单位进行操作的电路
在处理器的设计中,经常需要对一个 word 而非单个 bit 进行操作。
在 HCL 中,一般使用大写的名称表示 word,例如: bool Eq = (A == B) 表示计算 word A、B 是否相等的电路,可以实现为判断每个 bit 是否相等再 AND。
Multiplexor (MUX)
multiplexor (MUX) 的功能是通过信号输入的值来在其它输入中选择一个作为输出,word-level 的 MUX 电路如图 (CSAPP Figure 4.13):
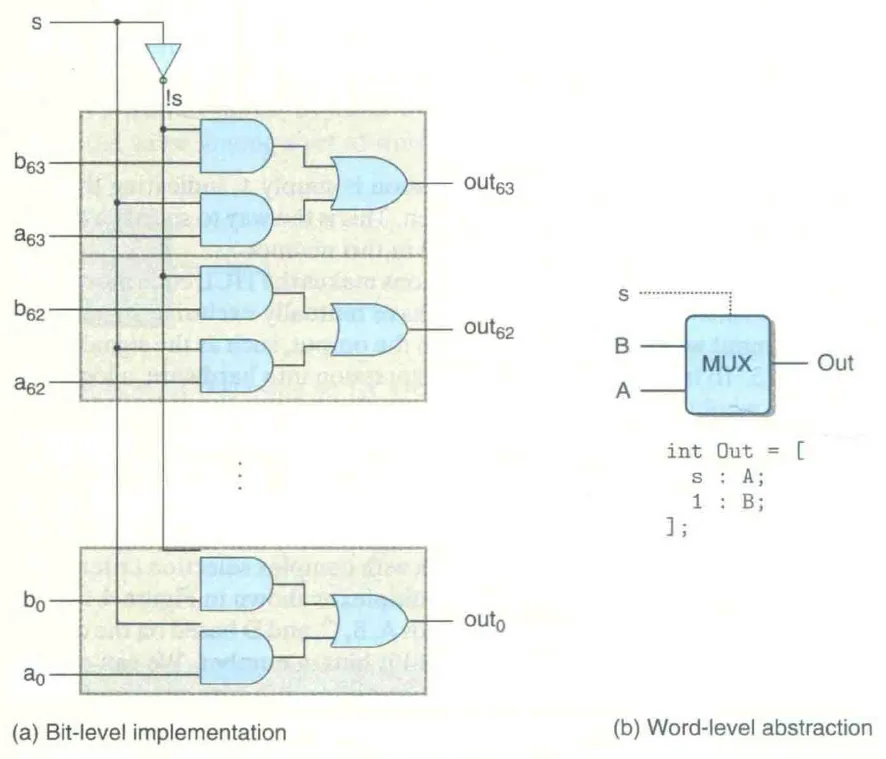
在 HCL 中,使用 case expressions 表示 MUX,例如
word Mux = [
!s1 && !s0: A;
!s1: B;
!s0: C;
1: D;
];表示一个由 s0 和 s1 控制的、在 A、B、C、D 中选一个作为输出的 MUX。
case expression 在逻辑上的语义是依次判断每个条件,以第一个满足的条件作为输出,类似于 Rust 的 match。
下面的 HCL 代码表示计算 A、B、C 中的最小值:
word Min3 = [
A <= B && A <= C: A;
B <= C: B;
1: C;
];Arithmetic/logic unit (ALU)
ALU 是用来进行算术/逻辑运算的组合逻辑电路元件,它接收两个 data input 以及一个表示进行何种运算的 control input,输出运算的结果。
测试值是否属于集合
在 HCL 中,可以使用 in 来表示测试值是否属于集合的电路,例如:
bool s1 = code in { 2, 3 };
bool s0 = code in { 1, 3 };Memory and Clocking
组合逻辑电路是无状态且实时更新的;与之相对,memory 可以存储状态,但更新由 clock 控制。
这一章中会用到的 memory 有两大种三小种:
- clocked register: 存储一个值,有一个输入和一个输出。输出即存储的值,而每次 clock rise 时会将存储的值修改为输入。
- random access memory:
- register file: 存储 15 个值(在 Y86-64 处理器中),有两个 read port 和一个 write port:
- 每个 read port 有一个输入
src表示 register identifier,有一个输出val表示这个 register 存储的值,且src改变后val会立刻改变。 - write port 有一个输入
dst表示 register identifier,另有一个输入val用于写入。每次 clock rise 时,如果dst不是F就会将val写入相应的 register。
- 每个 read port 有一个输入
- data memory: 存储很多个值,用地址进行索引。
- 有一个地址输入
address。 - 有一个信号输入
write表示进行写入而非读取。 - 有一个数据输出
data out。若write为 0,data out会立刻输出address处存储的值。 - 有一个数据输入
data in。若write为 1,在 clock rise 时会将data in写入address处。 - 有一个信号输出
error,在address不是合法地址时输出 1。
- 有一个地址输入
- register file: 存储 15 个值(在 Y86-64 处理器中),有两个 read port 和一个 write port:
可以看到,这几种 memory 的共同点是读取是实时的,但写入由 clock 控制。
在 Y86-64 的程序状态中,寄存器存在 register file 中,status flags、program counter、status code 存在 clocked register 中,memory 存在 data memory 中。
Y86-64 处理器还有一个额外的 read-only instruction memory 用来读取指令,而在真实的处理器中这是和内存一体的。
Sequential Y86-64 Implementations
这一节会实现一个名为 SEQ 的顺序执行的处理器。在这个处理器中,指令是按顺序一条接着一条执行的,且每条指令都会在一个 clock cycle 内执行完毕,这要求 clock cycle 很长,会导致处理器的执行很慢,下两节将对此进行优化。
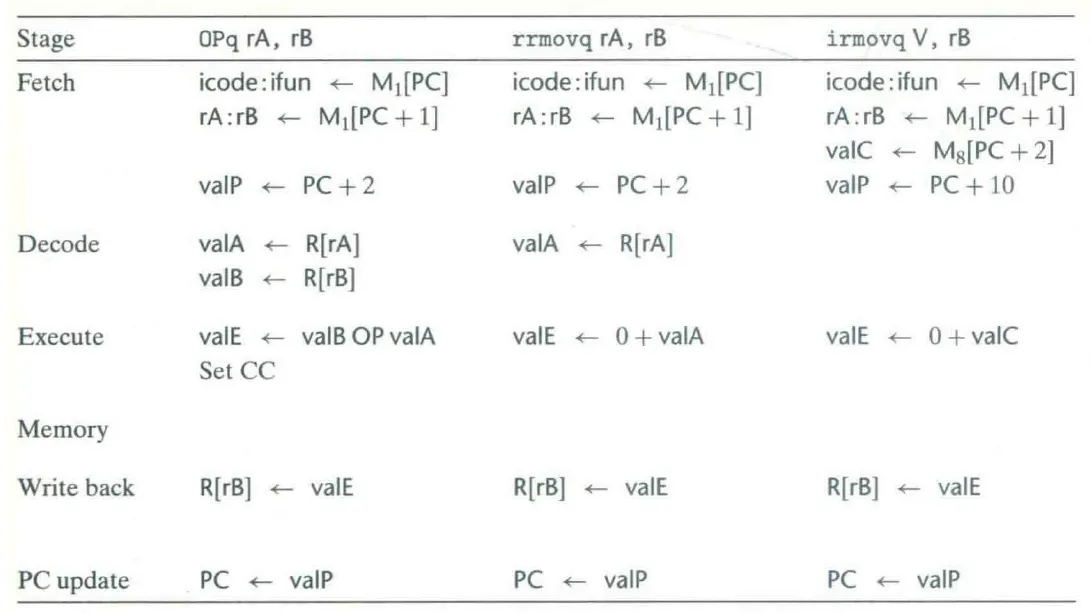
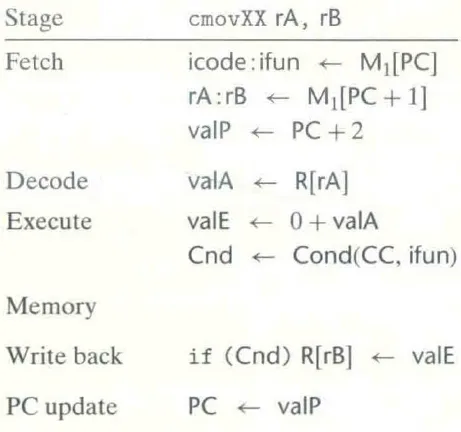
指令执行的阶段划分与具体操作
将指令的执行划分为多个阶段,可以使行为有很大差别的不同指令有一定的统一性,方便硬件实现。
本节会将指令执行划分为六个阶段:
- Fetch: 将指令编码中不同部分的值读取出来
- Decode: 读取寄存器的值(我感觉 fetch 和 decode 这两个名字互换一下才比较对 🤔)
- Execute: 执行运算
- Memory: 写入或读取内存
- Write back: 写入寄存器
- PC update: 更新 program counter
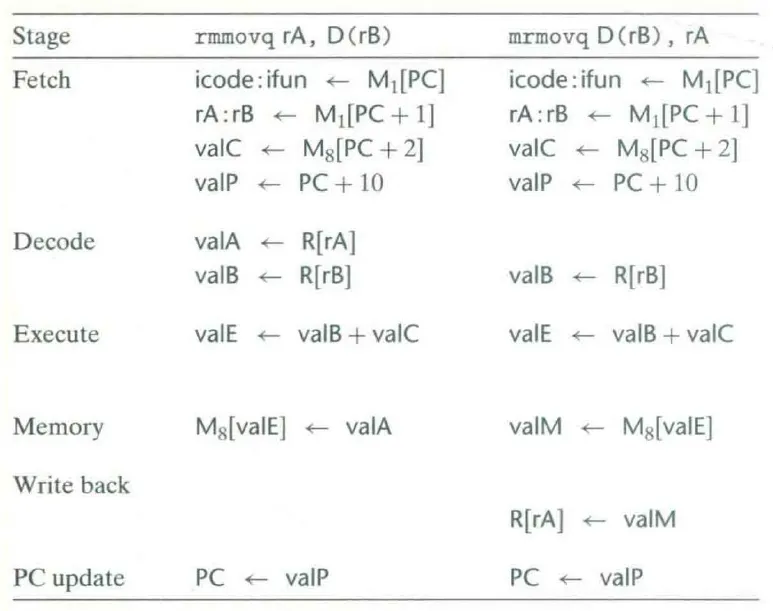
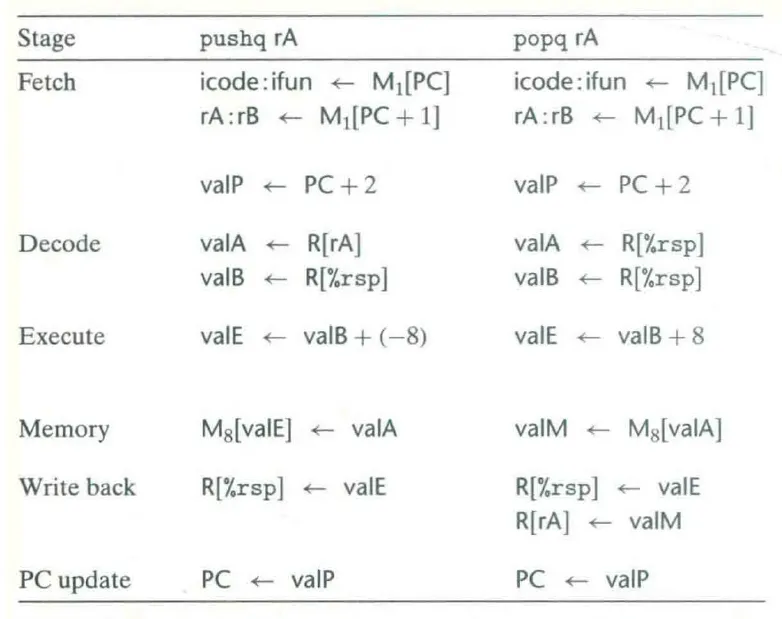
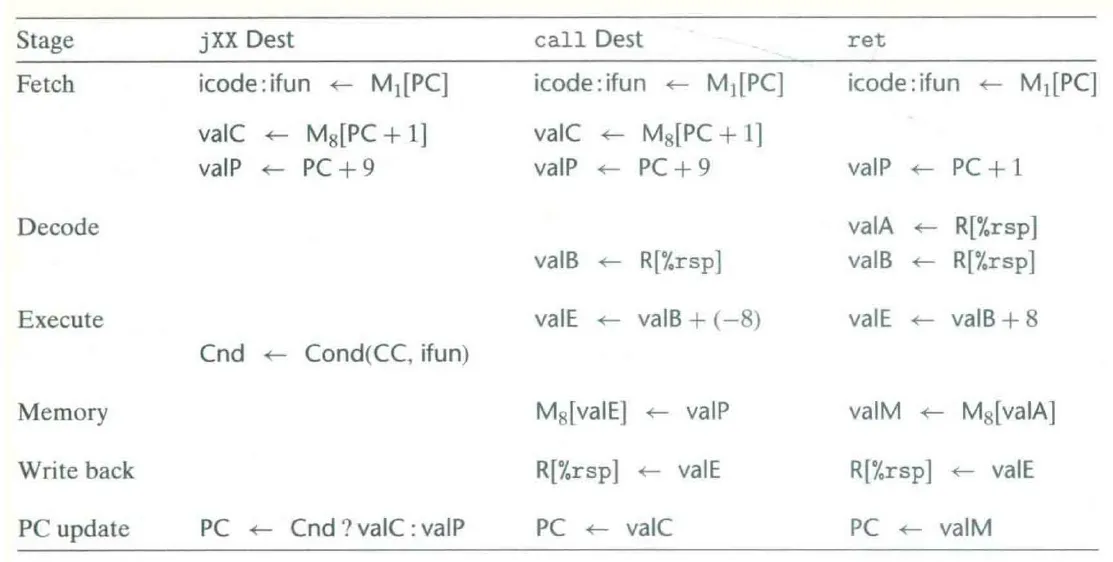
每个指令每阶段的具体操作如图(CS:APP Figure 4.18~4.21、Solution 4.17):
SEQ 的主体电路
CS:APP Figure 4.23 大致展示了 SEQ 的主体电路:
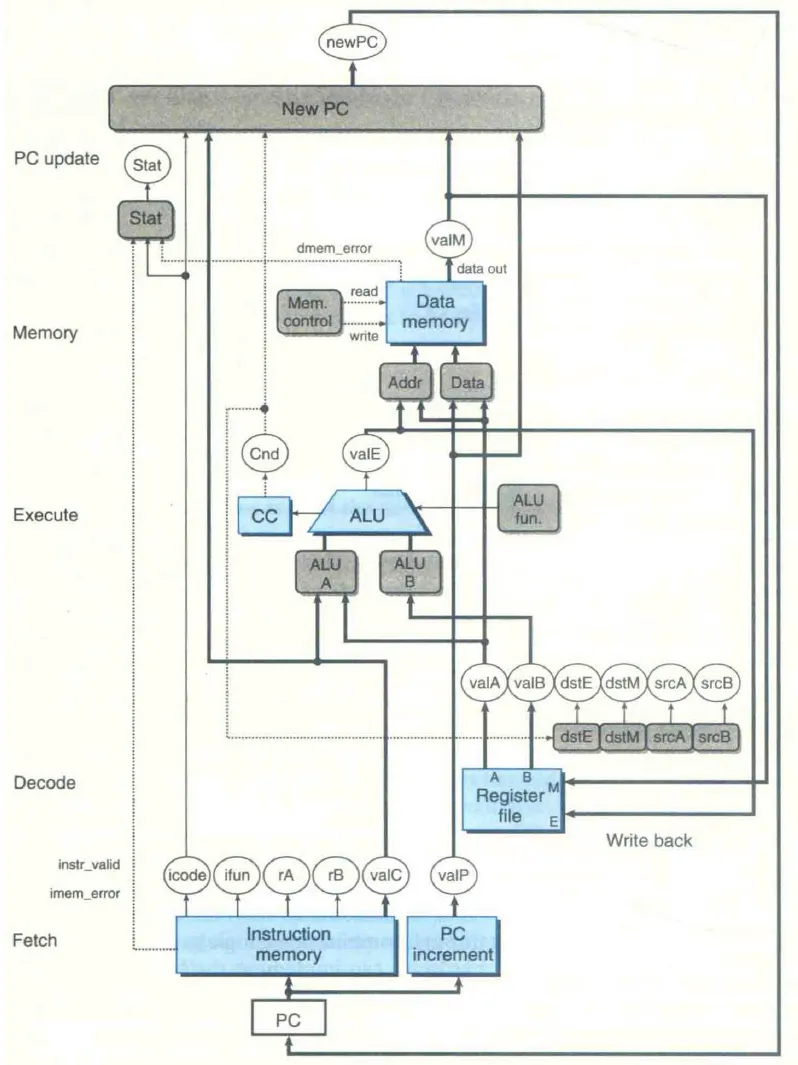
其中蓝色的元件是 black box,灰色的元件会在后面进行设计,还有部分电路连接没有画出来。
这个电路大概看着有个印象即可,细节会在后面说明。
SEQ 的时序控制
在 SEQ 中,每个时钟周期执行一条指令,而时钟控制的只有各种 memory 的写入,memory 的读取和运算都是用组合逻辑电路实现的,虽然在逻辑上有执行顺序,在电路上却是同时执行的,可以看成一个关于 memory 的函数。
也就是说,整个执行过程是:读取 memory 并计算出需要写入 memory 的值,然后在 clock rise 时执行写入,从而读取到新的 memory 的值而执行下一条指令。
为了这个设计能够实现,一条重要的原则是 “No reading back”,即一条指令不能先更新再读取同一个值。例如,在 pushq 中,不是先更新 R[%rsp] 再写入 M[R[%rsp]],而是先算出 valE,再写入 M[valE],最后将 valE 写入 R[%rsp]。又例如,有的指令会修改 status flags,有的会读取,但没有指令既修改又读取。
因为运算都是同时进行的,执行的六个阶段实际上是六个部分。